君は学びつくすことができるか?ザクを自在にプログラミング・制御が可能な『ZEONIC TECHNICS』
ガンダム
ワンダー 8
公開日2019.12.09
SNSで共有する

発売日2020年3月で、価格は98,890円(税込)。10月からプレミアムバンダイにて受注がスタートした『ZEONIC TECHNICS』。展示会などにも出展され、話題を呼んでいる。とはいえ、これまでの注目されてきたのは、ザクIIがロボットになり二足歩行が可能である等のハードウェア面がほとんどだ。しかし『ZEONIC TECHNICS』の真髄はザクをロボティクスとともに制御できる点。すなわち、ソフトウェア面にある。そこで、ここでは、ザクを操作するためのアプリについて紹介していこう。
このトピックスをいいねと思ったらクリック!
このトピックスのもくじ
ザクの操作は、iOS、Android対応の専用アプリで入力する方式で、その基本となるのは「コントロール」「ポーズメイク」「モーションメイク」「プログラム」の4つのモードである。それぞれ、モードを詳しく紹介していこう。
![キャプ[111]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-09_15-02-51-805.png)
※掲載されているアプリケーションは開発途中のバージョンです。今後、機能や仕様が変更される場合があります。
ロボット独特の動き方が理解できる「コントロール」モード
まずは基本となる「コントロール」モードからチェックしていこう。このモードは、画面に表示されたユニット型のメニューをタップすることで、直接、ザクを操作できるモード。アプリをリモコンにして、ザクを動かすことで、ロボットの動き方/動かし方に慣れることができる。まずは色々な動きをこの「コントロール」モードで試してみることをおすすめする。
![キャプ[211]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_10-00-24-679.PNG)
![キャプ[212]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-09_17-11-57-492.png)
![キャプ[213]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_10-02-01-186.JPG)
![キャプ[214][215]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-18-41-771.png)
![キャプ[216][217]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-19-11-188.png)
![キャプ[221]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_10-05-09-038.PNG)
![キャプ[221b][222]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-44-09-048.png)
![キャプ[223][224]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-50-37-025.png)
ザクの魅力を引き出す「ポーズメイク」と「モーション」
つぎに紹介するのは「ポーズメイク」と「モーション」の2つのモードだ。「ポーズメイク」は、ザクのポージングを記録するためのモード。ユーザーが独自にポーズをつくり、披露できるというもの。モーション作成にもつながる基本となる工程である。
一方の「モーション」は「ポーズメイク」でつくったポーズをザクの動きにつなげるためのモード。「ポーズメイク」でつくったポーズを実際にザクで実行する際、現状のポーズから作成したポーズに移るまでの速度や効果音などを設定することでモーションが完成する。この2つのモードを駆使すれば、ザクにオリジナルの動きをさせることができるのだ。
まずは「ポーズメイク」モードを試してみよう。基本は、ザクに組み込まれた、サーボモーターを個別に動かしてポーズをつくる仕組みだが、実際にザクを手動で稼働させ、ポーズをとらせたザクをスキャンしてザクの状態から各サーボモーターの状態を記録するモードも備えている。
ただし、スキャンモードは使用方法によって、サーボモーターの破損につながるため、画面の指示にしたがって注意深く使用してもらいたい。
![キャプ[311]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-51-28-023.PNG)
![キャプ[312]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-51-38-215.JPG)
![キャプ[321a]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_13-52-26-796.JPG)
![キャプ[322a][322b]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-13-18-277.png)
![キャプ[323]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-14-06-070.PNG)
ポーズメイクが終わったら、次は「モーション」モードで、記録したポーズに“動き”を加える。通常モーションとは、動きの始点と終点のセットで考えられることが多い。但し、ジオニックテクニクスでは、モーションはその終点のみに着目している。それは、ロボットは状況状況でその時点のポーズは様々であるため、それら全ての「始点-終点」の組み合わせを作ることは不可能である。ゆえにザクがどんなポーズを(始点として)とっていたも、終点に向けて動くように、自動計算をし、中間の動きを補正している。したがってモーションとして設定するのは、選択ポーズに移るまでの時間と効果音のみである。速度を早くすれば、切れ味の良い動きになるが、動きの反動でバランスを崩してといったこともあり、ポーズに合わせて調整が必要だ。また、効果音は動作に合わせて出力することにより、よりイメージが広がる。ザクの動きをより魅力的に見せるのは「モーション」の使い方次第というわけだ。
![キャプ[411]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-14-15-950.PNG)
![キャプ[412][413]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-14-25-521.png)
![キャプ[414]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-15-26-366.PNG)
「モーション」モードでは、効果音の設定もできます。あらかじめ用意された効果音から選び、再生タイミングを設定すれば準備完了。
「モーション」モードで[テスト実行]をタップすると、ザクが動き出し、作成したモーションを披露。効果音つきで動き、ザクらしさを楽しめる。そしてこうして作成したモーションはユニットとして「コントロール」モードや「プログラミング」モードにて使用することが出来る。
単純な仕組みながら、じつに奥が深い「プログラミング」モード
最後に紹介するのが「プログラム」モードだ。このモードは、文字通り、ザクをプログラミングに沿って動かすモードだ。プログラム実行の条件となる[TRIGGER]を設定し、条件に満たした場合と条件を一致しなかった場合で、処理が分岐する方式となっている。ごく単純な仕組みだが、条件設定に関数が使えるなど、中身は本格派。使いこなせるようになれば、ザクをしっかりと自動制御することが出来るようになるだろう。
![キャプ[511]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-15-36-195.PNG)
![キャプ[521]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-15-45-517.PNG)
![キャプ[522]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-15-53-276.PNG)
![キャプ[523][524]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-16-02-173.png)
![キャプ[525][526]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_15-50-22-299.png)
![キャプ[527]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-18-01-448.PNG)
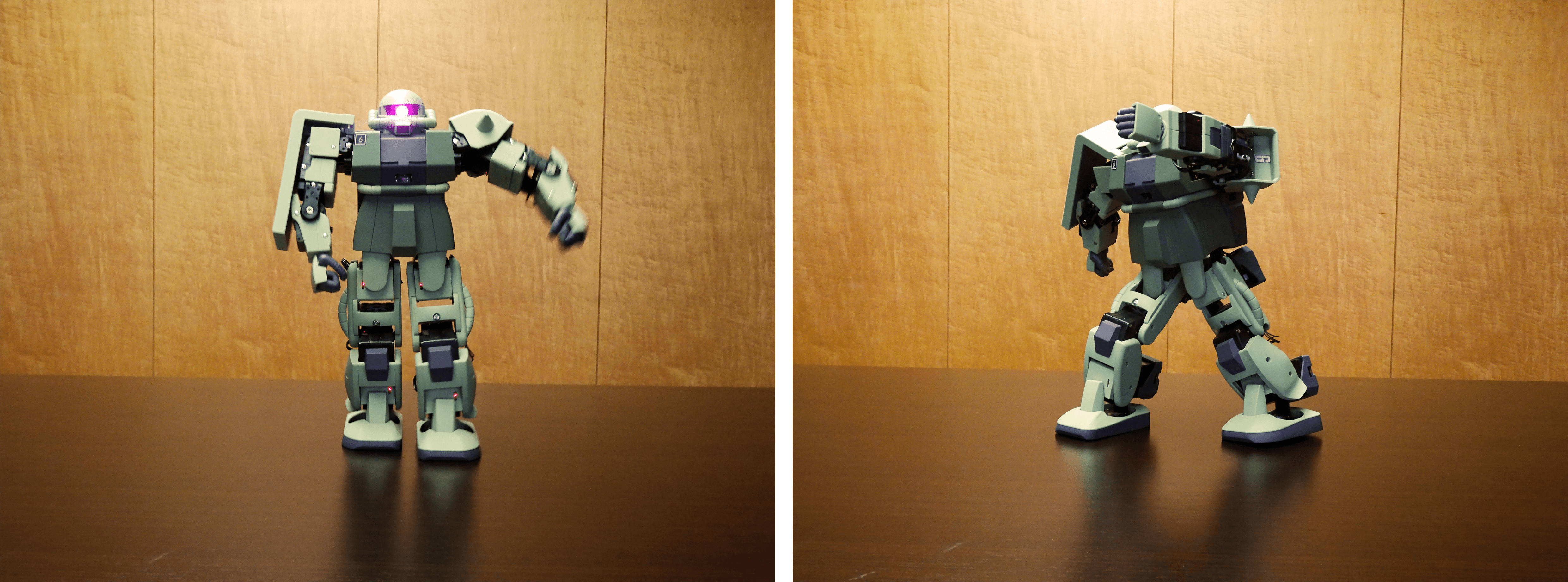
本レビュー向けに、ごく簡単なプログラムを作成してみた。前進、後退、右フック、左フックの4つの動作を組み合わせたもので、本アプリのプログラムにすると、わずか4行の短いプログラムだが、プログラムを進行させるための条件付けなど、工夫するべき部分はたくさんある。複雑なプログラムを作成したわけではないが、ザクが、無事、想定通りに動き、無事にプログラムが完了すると、やはりうれしい。もっと高度なプログラムに挑戦してみたいと思わせる楽しさがある。
![キャプ[611][612]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-18-13-822.png)
![キャプ[621a]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-18-36-432.PNG)
![キャプ[621b][621c]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-19-58-669.png)
![キャプ[622a]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-20-33-244.PNG)
![キャプ[622b]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-20-43-039.JPG)

![キャプ[623a][623c]](https://d38vrblg2ltm93.cloudfront.net/admin/image/2019-12-05_14-21-28-072.png)

直感的に操作ができる“アノ”操作システムも搭載
『ZEONIC TECHNICS』には、もう1つ特異な制御モードがある。それが「モビルトレース」モードだ。「モビルトレース」は、ロボットが高額的にはマスタースレイブ方式と呼ばれており、操縦者の動きをセンシングしてロボットが動く仕組みである。『ZEONIC TECHNICS』では、スマホやタブレットの角度や動きに応じて、ザクの腕が動くという機能。ちょっぴり未来へ、レディゴー!
手に持った端末(スマホ)の動きをザクの各サーボに直結し、ザクの上半身をコントロールします。ちなみに、処理を両腕にミラーリングすることで、1台の端末から両腕を動かすことも可能だ。
商品詳細
プレミアムバンダイ
「ZEONIC TECHNICS(ジオニックテクニクス)」紹介動画




みんなの作品